Reinforcement Learning
Table of contents
Overview
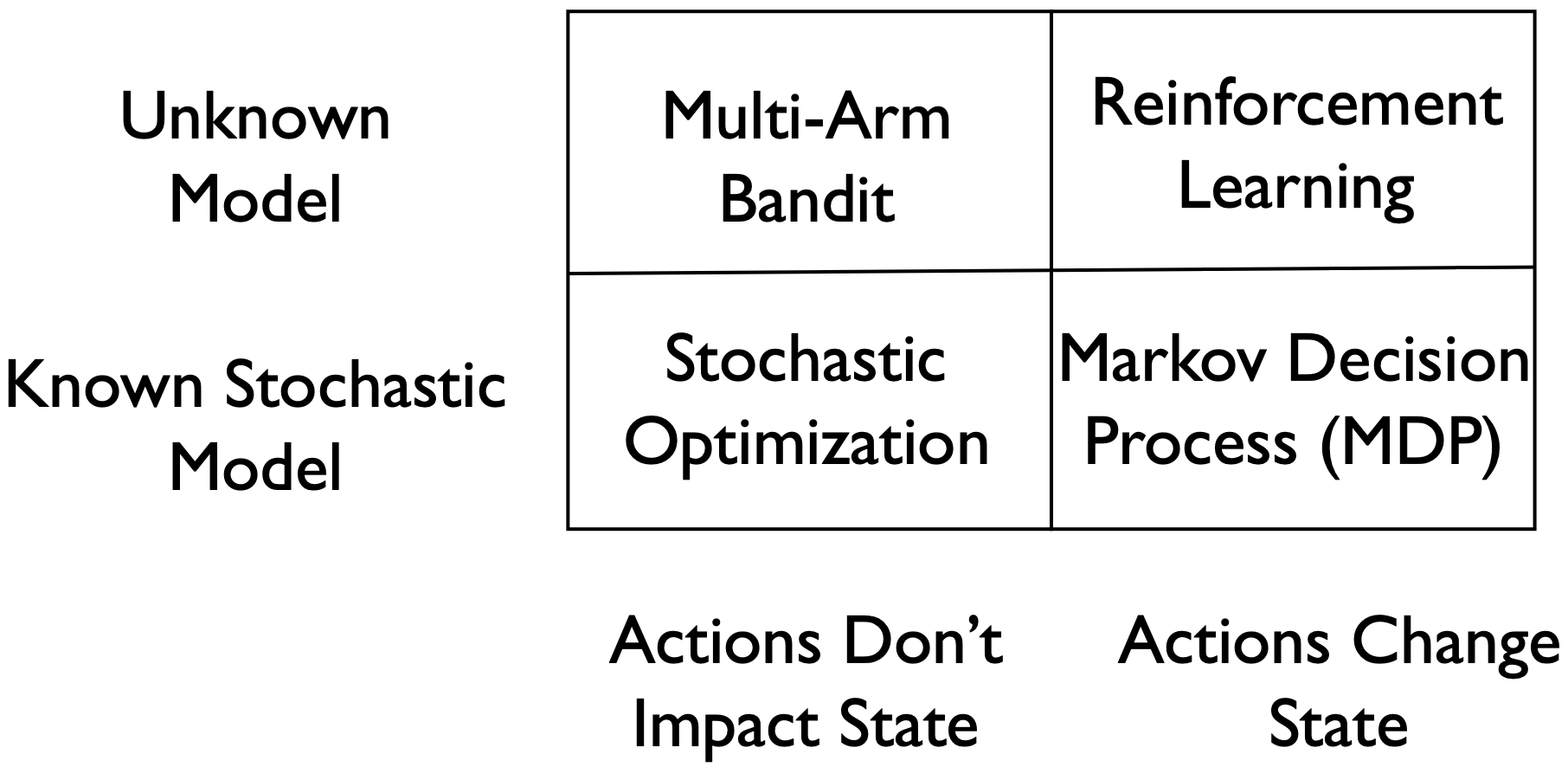
We will start with example and applications of this field and give a general framework for decision making models under uncertainty. Then we will discuss 4 different scenarios – with different state dynamics and known or unknown models.
Later, we will focus on 2 scenarios of these 4, the stochastic optimization, which assumes fixed state and known model, and multi-arm bandit, which assumes fixed state but unknown model. The other scenarios will be covered in coming lectures.
Sequential Decision-making Problems (Under Uncertainty)
Decision-making versus Supervised Learning
For easier understanding of our problem, we first make a comparison between decision making and supervised learning. In supervised learning, we work with a set of features and a target and learn a function mapping from the features to the target. The decision making problem actually builds upon that. In this setting, we not only want the prediction of the target to be correct, but want to learn about the environment as well, so that we can make decisions and interact with the environment.
As shown in the diagram in Figure \ref{diagram}, we do learn a model about uncertainty and that helps us to decide what to do, upon that, we can make a decision, interact with the environment and observe new data, and continue the iteration again. Eventually, we will end up with a sequence of decisions.
Sub-categories of Decision Making
- The four big types of sequential decision-making problems
- Bandits
- MDP
- RL
- Stochastic optimization
 and their connections and differences. The “under uncertainty” modifier is really what makes these problems interesting and practical.
and their connections and differences. The “under uncertainty” modifier is really what makes these problems interesting and practical.
Stochastic optimization
(Known model, fixed state)
Suppose we are a retail store manager and we need to decide what to put on the shelf for an entire winter season. Let’s assume people’s demands and preferences are approximately unchanged every year, so that the model is known if we look at the historic data. Also, people’s demand is not affected by what we put on the shelf, so there’s no impact of the actions on the state. What we want is to decide what to stock in the market and the reward is how much money we make. As a summary,
- State: customer demand
- Action: how much inventory to stock subject to various constraints
- Transition Kernel: no transition
- Reward: revenue
This scenario is called stochastic optimization.
Bandits
(Unknown model, fixed state)
Suppose we are designing an online e-portal where we need to decide what contents should be shown to a new customer on the website. Depending on the customer’s preference and what we show to him, the customer may or may not continue to engage with our website and we want the customer to engage. We can assume all the customers are from some unknown population, which is the state of the decision making problem. The population will not be affected by the actions we take, thus there’s no transition between states. The reward is positive if people continue to engage, and negative vice versa.
As a summary,
- State: customer population
- Action: which of the N pages to show to the arriving customer
- Transition Kernel: no transition
- Reward: conversion if right page, loss of opportunity if wrong page
This scenario is called multi-arm bandit.
MDP
(Known model, dynamical state)
Let’s suppose we are designing an automatic chess player, but only to beat a specific player. This player is well known by us and can predict what he will do in any situations, which corresponds to the known transition kernel in our decision making problem. The board position, which is the state, constantly changes, and the actions is to decide is to play a move of the chess given a state. The reward will be positive if we win and negative if we loss.
As a summary,
- State: board position
- Action: which of the feasible moves to play
- Transition Kernel: change in board position due to play of opponent, which is \textbf{known}
- Reward: win ($+l$) or loss ($-l$)
This scenario is called Markov Decision Process, or MDP.
RL
(Unknown model, dynamical state)
Suppose we are doing the same thing as the previous chess playing scenario and the only different thing is that we are now playing with a completely unknown player. Everything is as before, except that we do not know the transition kernel, i.e., we don’t know what the player is going to do given the board position, and thus we need to learn as we play.
As a summary,
- State: board position
- Action: which of the feasible moves to play
- Transition Kernel: change in board position due to play of opponent, which is \textbf{unknown}
- Reward: win ($+l$) or loss ($-l$)
This scenario is known as reinforcement learning.
Different fields that study these problems:
- Control theory (especially robust control)
- Operations research
- Finance
- Social sciences
Some comments on each field’s unique challenges. On one hand, good that a single framework has so many applications; on the other hand though, inevitable notational mess.
Reinforcement Learning Set Up
Agent and environment
No longer have access to the transition model, and sometimes no access to the rewards model either.
So there’re the loss of two key components here; losing either makes the problem hard. Different applications might have different levels of lost access. For instance, often times in rigid-body robotics, we have at least the law of physics as a guiding principal and from that we get vague ideas of the transition.i